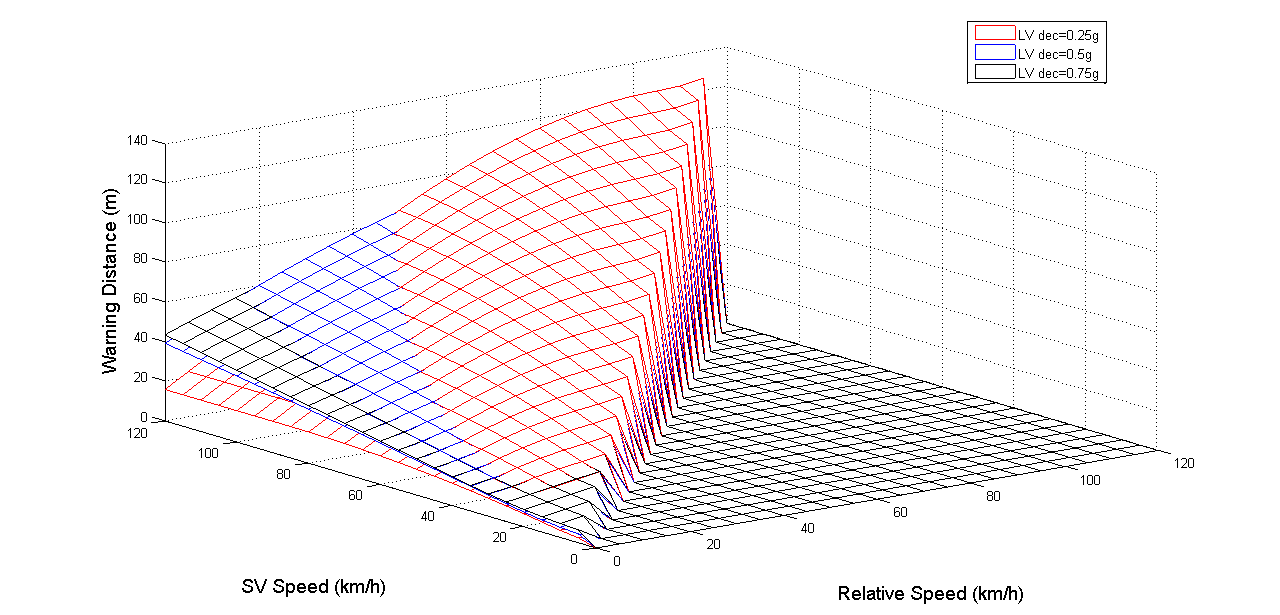
 Domain of validity of the proposed forward collision warning algorithm.
Domain of validity of the proposed forward collision warning algorithm.
Development of a kinematic-based forward collision warning algorithm using an advanced driving simulator
Abstract
An effective Forward Collision Warning system (FCW) must be compatible with drivers’ risk perceptions and behavioral responses. The Collision Avoidance Metrics Partnership (CAMP) developed a kinematic-based FCW algorithm to determine the minimum distance needed to stop safely under various levels of rear-end crash risk. The algorithm generates a linear function for predicting drivers’ Expected Response Decelerations (ERDs) by considering motions of the involved vehicles. This linear function works well when the risks perceived by drivers are low, however; at elevated risks when the Lead Vehicle (LV) decelerates at an unexpectedly high rate, or at high relative speeds, the warnings are triggered too late for the Subject Vehicle (SV) to avoid a rear-end collision. The current study extends the CAMP FCW algorithm to improve the handling of extreme high collision risk scenarios. A total of 111 brake-only non-collision events were presented in the Tongji University Driving Simulator and drivers’ braking behaviors were used to model their ERDs. We found ERDs depended on the interaction of LV deceleration and relative speed. In response to this finding, a non-linear function with an interaction term was combined with a linear function into a piecewise function that accommodated both higher and lower LV deceleration conditions. The applicable domain of the warning onset range was then computed for a wide range of kinematic conditions. Results showed the piecewise function to be a better predictor of ERD than the linear function, and to result in fewer driver rejections of the forward collision warnings.