Featured Publications
TransFollower: Long-Sequence Car-Following Trajectory Prediction through Transformer
To model the long-term dependency of future actions on historical driving situations, we developed a long-sequence car-following trajectory prediction model based on the attention-based Transformer model. The encoder takes historical speed and spacing data as inputs and forms a mixed representation of historical driving context using multi-head self-attention. The decoder takes the future LV speed profile as input and outputs the predicted future FV speed profile in a generative way (instead of an auto-regressive way, avoiding compounding errors). Through cross-attention between encoder and decoder, the decoder learns to build a connection between historical driving and future LV speed, based on which a prediction of future FV speed can be obtained.
Arxiv preprint. ASA TSIG Student Paper Award., 2022.
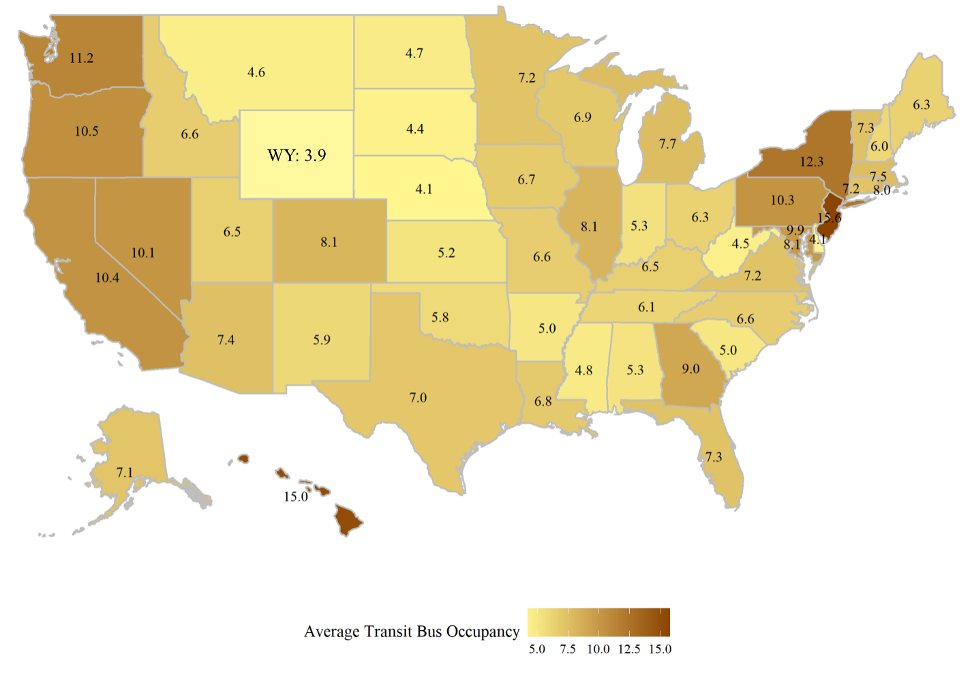
Developing a Practical Method to Compute State-Level Bus Occupancy Rate
This work supported the Federal Highway Administration (FHWA) in presenting state and metropolitan area vehicle occupancy information in compliance with Title 23 of the US Code of Federal Regulations, Part 490 National Performance Measures. The basic goal is to provide and introduce a statistically effective and realistic approach to approximate bus occupancy rates for each US state and Washington, DC. Bus occupancies were calculated separately for transit buses, school buses, and motorcoaches.
Journal of Transportation Engineering, Part A: Systems, Vol. 147, Issue 6, 2021.
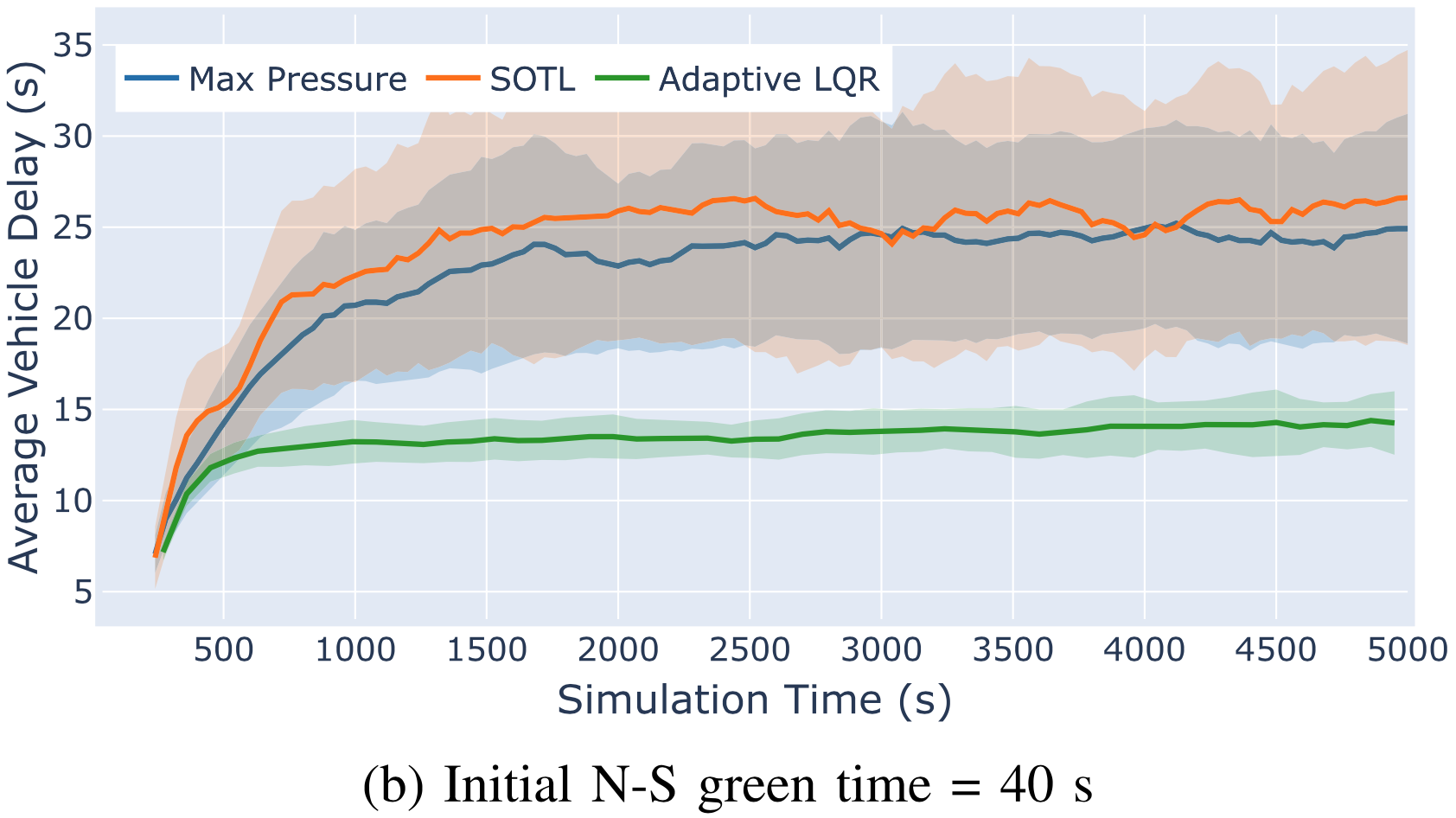
Optimizing Signal Timing Control for Large Urban Traffic Networks Using an Adaptive Linear Quadratic Regulator Control Strategy
This study proposes an adaptive multi-input and multi-output traffic signal control method that not only can improve network-wide traffic operations in terms of reduced traffic delay and energy consumption, but also is more computationally feasible than existing centralized signal control methods. Considering intersection interactions, a linear dynamic traffic system model was built and adaptively updated to reflect how the signal control input of each intersection affects network-wide vehicle travel delay. Based on the system model, an adaptive linear-quadratic regulator (LQR) was designed to minimize both traffic delay and incremental changes in the control input.
IEEE Transactions on Intelligent Transportation Systems, Vol. 23, Issue 1., 2020.
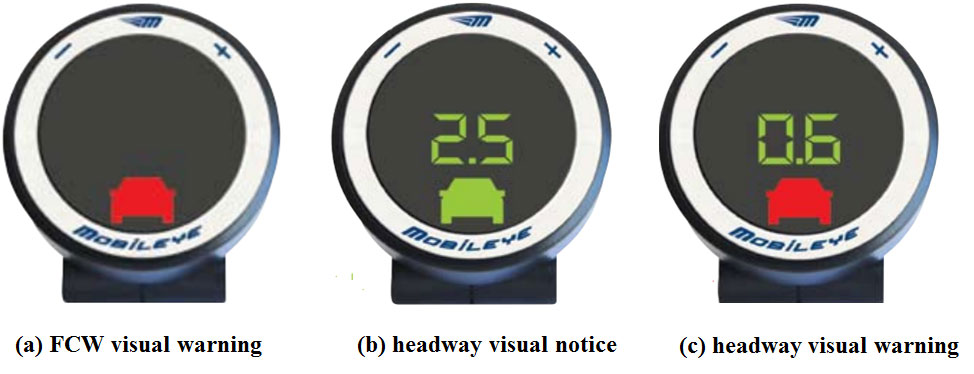
Impact on Car Following Behavior of A Forward Collision Warning System with Headway Monitoring
This study aimed to investigate the impact of Forward Collision Warning (FCW) systems on drivers’ car-following behaviors. Five data collecting vehicles are equipped with Mobileye® systems, which include an FCW function. Participants drive the instrumented vehicles for two months, with the Mobileye® system not activated for the first month, but activated for the second month. The results of this study show that (1) drivers tended to maintain a longer headway when FCW activated; and (2) the FCW resulted in a 0.13s decrease of reaction time in daytime driving, and a 0.09s decrease when a following vehicle had higher speed than the lead vehicle. Moreover, this study further confirms that the reaction time is affected by relative distance, lead vehicle acceleration, and traffic density.
Transportation Research Part C: Emerging Technologies 111, 226-244, 2020.
Monitoring Public Transit Ridership Flow by Passively Sensing Wi-Fi and Bluetooth Mobile Devices
This study proposed a system for monitoring real-time public transit passenger ridership flow and O-D information based on customized Wi-Fi and Bluetooth sensing device. By combining the consideration of the assumed overlapping feature spaces of passenger and nonpassenger media access control address data, a three-step data-driven algorithm framework for estimating transit ridership flow and O-D information is proposed.
IEEE Internet of Things Journal 8 (1), 474-486, 2020.
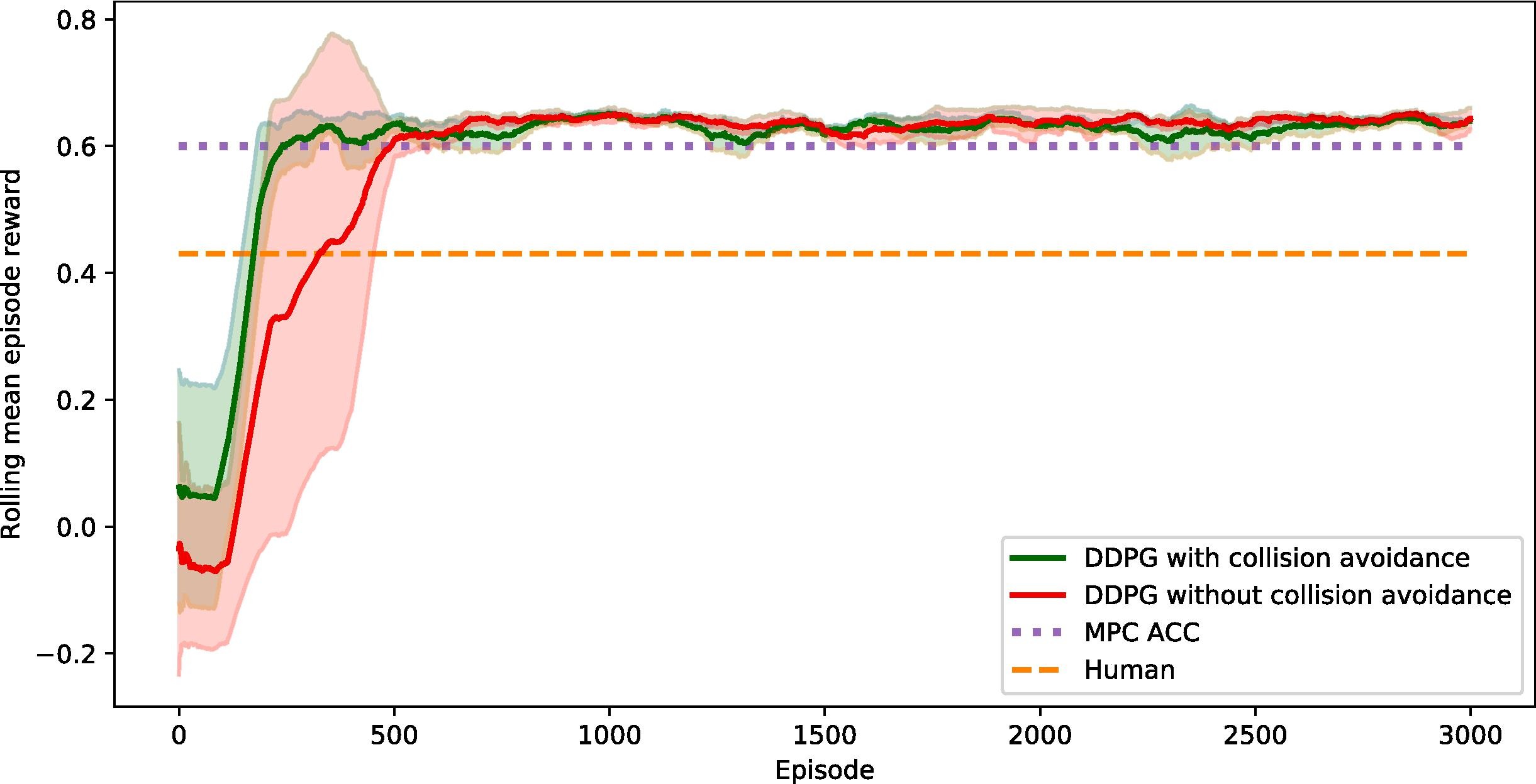
Safe, Efficient, and Comfortable Velocity Control based on Reinforcement Learning for Autonomous Driving
A model used for velocity control during car following was proposed based on deep reinforcement learning (RL). A total of 1,341 car-following events extracted from the public Next Generation Simulation (NGSIM) dataset were used to train the model. Results show that the model demonstrated the capability of safe, efficient, and comfortable velocity control in that it 1) has small percentages (8%) of dangerous minimum time to collision values (< 5s) than human drivers in the NGSIM data (35%); 2) can maintain efficient and safe headways in the range of 1s to 2s; and 3) can follow the lead vehicle comfortably with smooth acceleration.
Transportation Research Part C: Emerging Technologies 117, 102662, 2020.
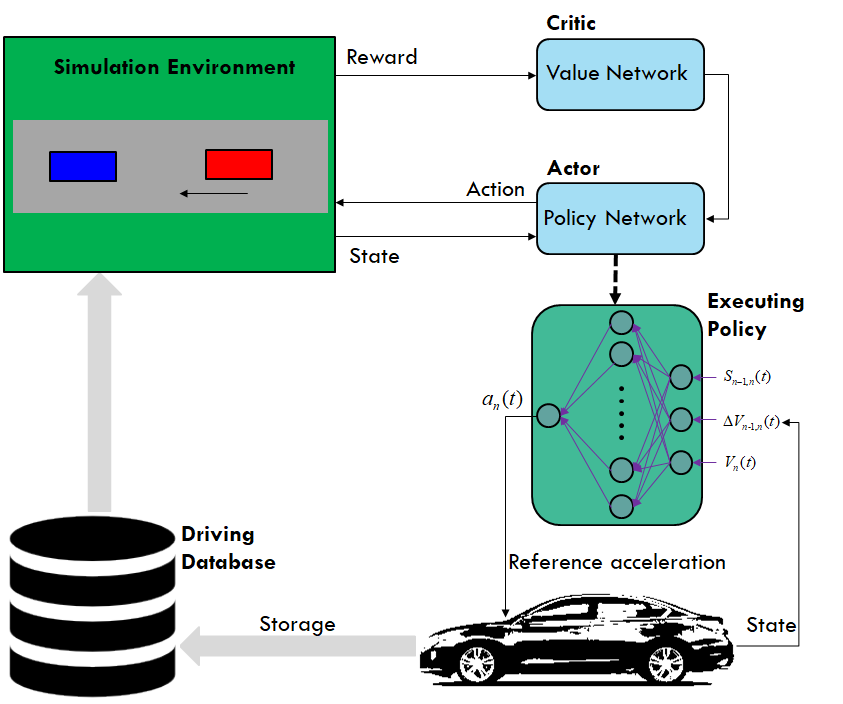
Human-Like Autonomous Car-Following Planning by Deep Reinforcement Learning
This study uses the technique of deep reinforcement learning to model drivers’ car following behavior. Two thousand car-following periods extracted from the Shanghai Naturalistic Driving Study were used to train the proposed model and compare its performance with that of four traditional car-following models. The proposed model can reproduce human-like car-following behavior with significantly higher accuracy than traditional car-following models, especially in terms of speed replicating. Moreover, the model demonstrates good capability of generalization to different driving situations and can adapt to different drivers by continuously learning.
Transportation Research Part C: Emerging Technologies 97, 348-368, 2018.

Modeling Car-Following Behavior on Urban Freeways in Shanghai: A Naturalistic Driving Study
Five representative car-following models were calibrated and evaluated for Shanghai drivers, using 2100 urban-expressway car-following periods extracted from the 161,055 km of driving data collected in the Shanghai Naturalistic Driving Study (SH-NDS). The results show that the intelligent driver model (IDM) has good transferability to model traffic situations not presented in calibration, and it performs best among the evaluated models. Compared to the Wiedemann 99 model used by VISSIM®
Transportation Research Part C: Emerging Technologies 93, 425-445, 2018.
Drivers’ Rear End Collision Avoidance Behaviors under Different Levels of Situational Urgency
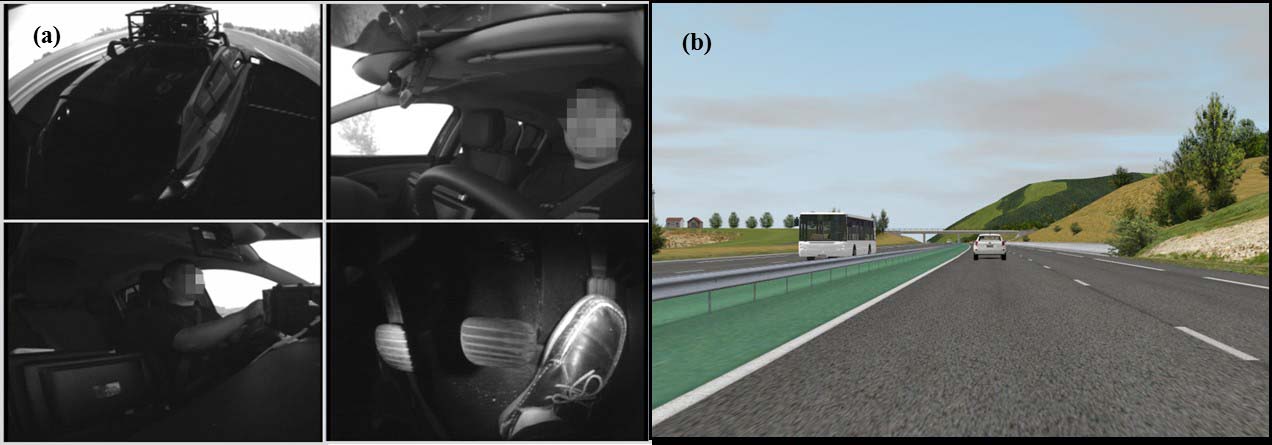
A simulator is used to test drivers’ collision avoidance behaviors under different initial headways and different lead vehicle deceleration rates. As situational urgency increase, drivers release the accelerator faster, brake to full braking with less time and brake harder. Transition time between initial throttle release and brake initiation is not affected by initial headway or LV deceleration rate. At low situational urgency, multi-stage braking behavior leads to longer delays from brake initiation to full braking.
Transportation Research Part C: Emerging Technologies, Vol. 71, pp. 419-433, 2016.
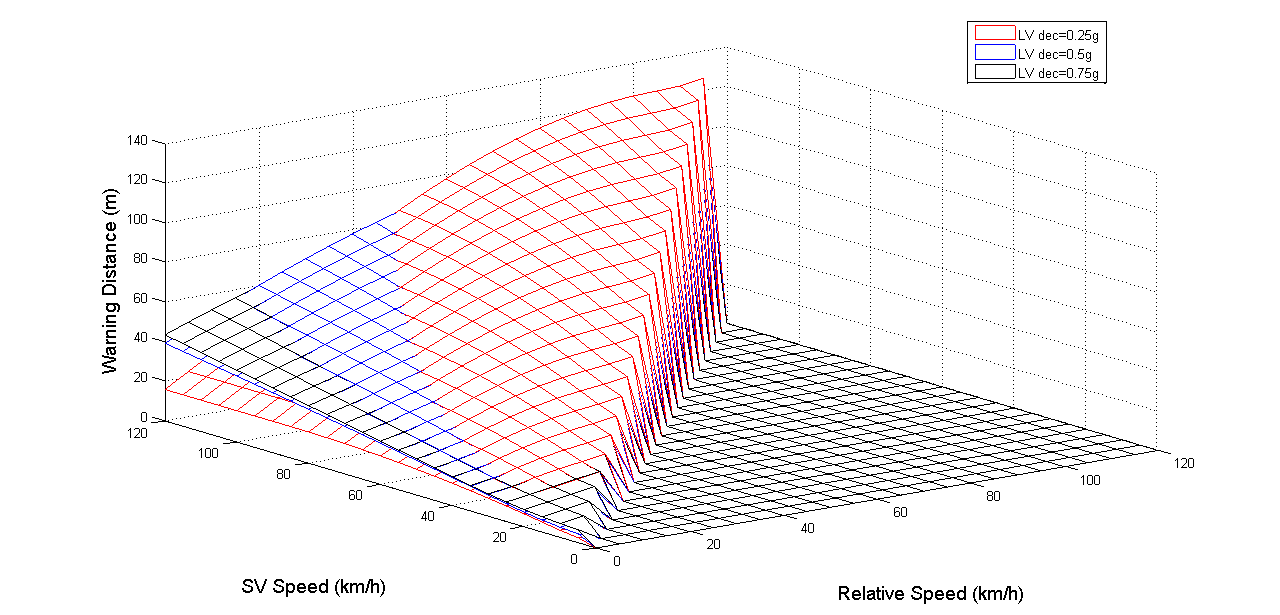
Development of a kinematic-based forward collision warning algorithm using an advanced driving simulator
A total of 111 brake-only non-collision events were presented in the Tongji University Driving Simulator and drivers’ braking behaviors were used to model their Expected Response Decelerations (ERDs). We found ERDs depended on the interaction of LV deceleration and relative speed. In response to this finding, a non-linear function with an interaction term was combined with a linear function into a piecewise function that accommodated both higher and lower LV deceleration conditions. The applicable domain of the warning onset range was then computed for a wide range of kinematic conditions. Results showed the piecewise function to be a better predictor of ERD than the linear function, and to result in fewer driver rejections of the forward collision warnings.
IEEE Transactions on Intelligent Transportation Systems, Vol. 17, No. 9, pp. 2583-2591, 2016.