Work Summary
- Examined the effects of situational urgency on drivers’ collision avoidance behaviors using Tongji University’s eight-degree-of-freedom driving simulator.
- Developed a kinematic-based forward collision warning (FCW) algorithm that is compatible with drivers’ risk perceptions and behavioral responses.
- Implemented the proposed FCW algorithm in Tongji University driving simulator, and evaluated the system’s performance, warning timing, and safety benefits.
Introduction
Driving Behavior Research for Intelligent Collision Avoidance Technology is a driving simulator study jointly conducted by Tongji University and China First Automobile Work (FAW) Corporation (one of the largest automobile companies in China). The main purpose of this project is to improve the understanding of drivers’ collision avoidance behavior under different rear-end scenarios and to develop an effective forward collision warning (FCW) strategy. Driving simulators are ideal for performing these kinds of studies because of their ability to systematically vary perceived urgency while capturing quantitative data on relevant aspects of driver and system performance.
In this project, the Tongji University Driving Simulator was used to generate different urgency levels by varying headway and LV deceleration while capturing data on perception response times (PRT), throttle release response times, throttle to brake transition times, brake delays, maximum brake pedal pressures and peak decelerations. The relationships uncovered between situational urgency and drivers’ collision avoidance behavior measures can provide information that can be used to develop improved FCW systems.
Equipment
The Tongji University driving simulator, currently the most advanced in China, incorporates a fully instrumented Renault Megane III vehicle cab in a dome mounted on an 8 degree-of-freedom motion system with an X-Y range of 20 × 5 meters. An immersive 5 projector system provides a front image view of 250° × 40° at 1000 × 1050 resolution refreshed at 60 Hz. LCD monitors provide rear views at the central and side mirror positions. SCANeRTM studio software (OKTAL) presented the simulated roadway and controlled a force feedback system that acquired data from the steering wheel, pedals and gear shift lever. The transmission of the Renault Megane III vehicle was automatic, and the braking system was a non-ABS. The overall performance of this driving simulator was validated using three tests: simulator sickness, stop distance, and traffic sign size. Test results showed that the driving simulator satisfied the three criteria (i.e. at least 75% of participants show no simulator sickness, stop the car within 2 meters of a designated stop line and judge the realism of the traffic sign size) for validation.

Tongji University driving simulator
Experiment
Six females and 23 males, (ages 23–54, M = 33.2, SD = 8.3), who possessed valid driver’s licenses and had at least one year and 10,000 kilometers of driving experience recruited from the population of drivers in Shanghai served as participants. Participants initially drive on the inner lane of a two-lane freeway under good weather daytime conditions with light traffic, and were asked to accelerate to the target speed (120 km/h) at the beginning of the scenario. To minimize distractions, traffic was not present in the same direction of the SV, although for realism, light traffic was presented in the opposite direction. After about 2 minutes, a white lead vehicle (LV) moved in front of the SV. The LV was programmed to operate at a constant speed of 120 km/h, and participants were again asked to follow the lead vehicle at distance of 60 m to 80 m. The LV was programmed to make 6 unpredicted full stops with brake lights on, at prearranged initial headway settings of 1.5 sec and 2.5 sec, and at varying intervals.
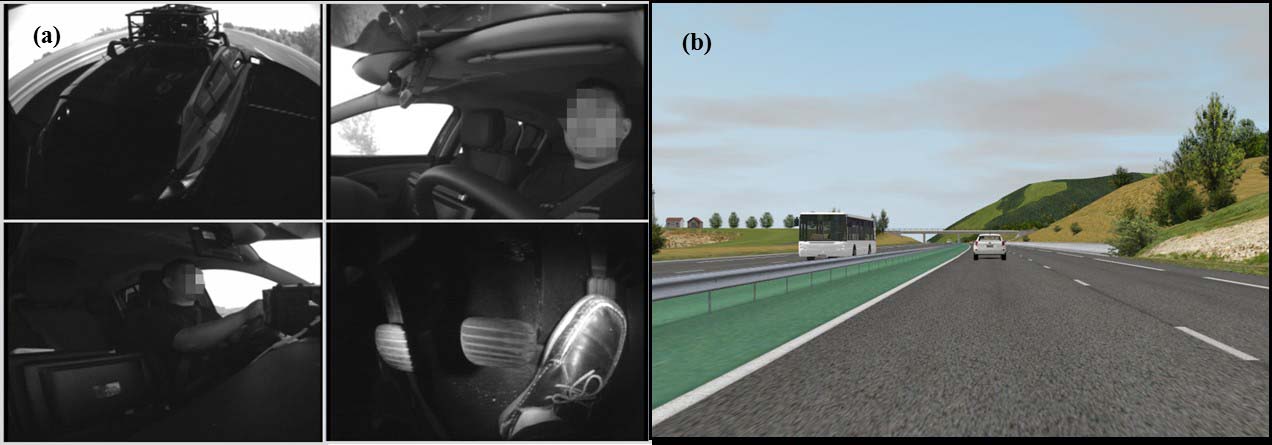
Video monitor displays (a) and experiment scenario (b)
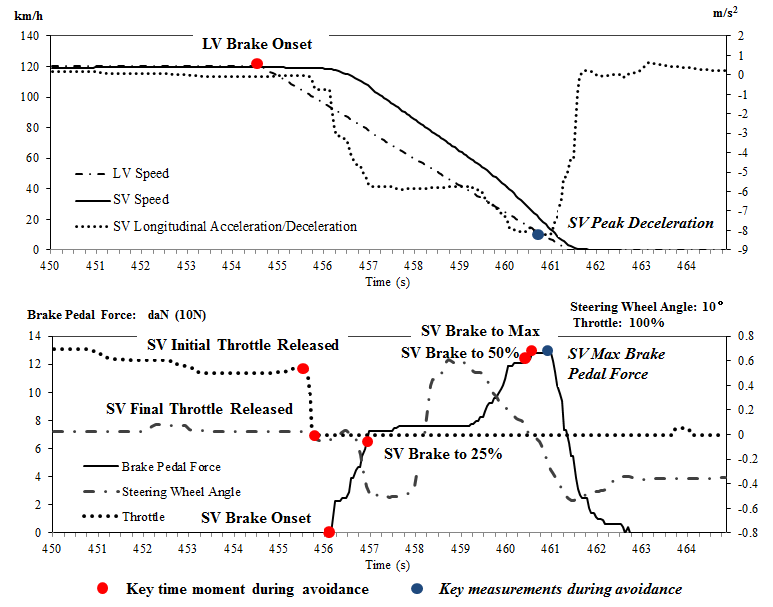
A typical collision avoidance event sequence