I am currently working on developing AlphaDrive, a platform equipped with real-world driving scenarios where intelligent agents can learn to drive by trial and error, trials and errors that number in the billions. The platform is comprised of three main modules:
- Driving Scenario Database: containing typical driving scenarios (e.g., car following, lane changing, overtaking, and vehicle-pedestrian conflicts) extracted from naturalistic driving studies or field operation test databases.
- Microscopic Traffic Simulator: loading driving scenarios, executing given driving policies and returning their performance indicators.
- Learning Algorithms: containing different learning algorithms (e.g., reinforcement learning, inverse reinforcement learning) that generate and update driving policies based on performance indicators returned from the driving simulator.
Thus far, longitudinal driving tasks have been successfully learned, and more driving tasks will be added in the future.
AlphaDrive
The whole framework involves building driving scenario databases, constructing driving skills learning platforms, and validating developed algorithms with high-fidelity driving simulators, as shown in the following figure.
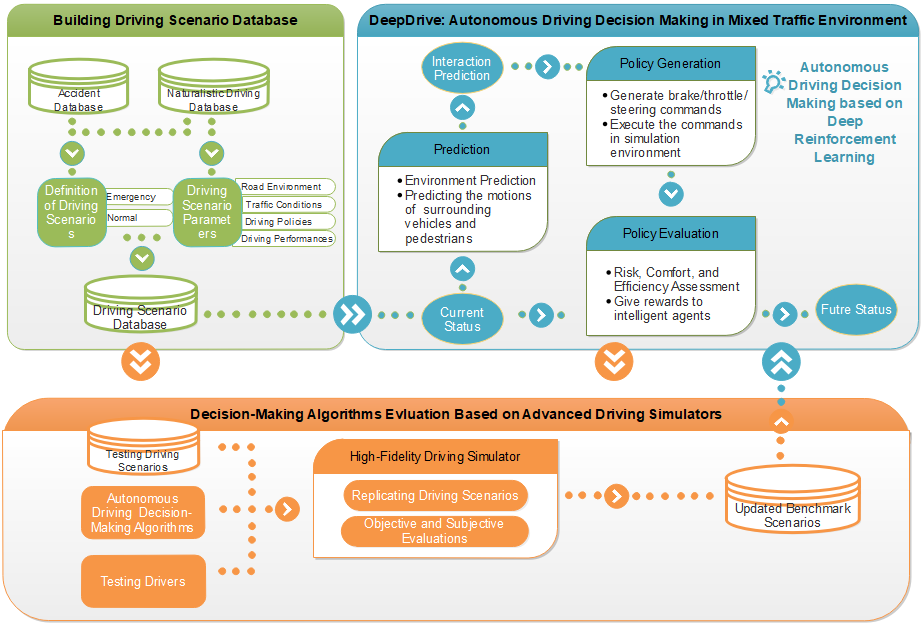
Framework of Autonomous Driving Algorithms Developing and Testing